O servo motor é muito utilizado em controle de precisão em projetos de automação industrial. No passado, quem ouvia falar em servo motor imaginava sua aplicação somente em projetos especiais com necessidade de controle preciso de torque, velocidade e posição.
No entanto, atualmente observa-se que cada vez mais seu custo vem se reduzindo fazendo com que ele seja uma excelente alternativa em substituição a acionamentos com motores de indução, atuadores hidráulicos e pneumáticos.

Embora os servo motores não sejam uma classe específica de motor (podem ser CC ou CA, síncrono ou de indução), eles são destinados e projetados para uso em aplicações de controle de movimento que exigem posicionamento de alta precisão, reversão rápida e desempenho excepcional.
Sendo assim, eles são amplamente utilizados em robótica, sistemas de radar, sistemas de fabricação automatizados, máquinas-ferramentas, computadores, máquinas CNC, sistemas de rastreamento, etc.
Abaixo, podemos visualizar uma tabela em que é possível comparar o servo motor com diferentes atuadores utilizados hoje em dia na indústria, suas vantagens e desvantagens:
| Tipo de Acionamento | Pontos Fortes | Pontos Fracos | |
| Dispositivo Mecânico | Dispositivo Hidráulico / Pneumático | – Estrutura simples – Preço competitivo |
– Baixa acurácia – Pode produzir vibração – Pode poluir o ambiente |
| Dispositivo Eletromecânico | Motor de Passo | – Controlador simples – Preço competitivo |
– Altos ruídos e vibrações – Não possui tamanhos elevados |
| Motor de Indução | – Preço competitivo | – Não se aplica a alta precisão | |
| Servo Motor | – Alta precisão no controle – Torques altos e Força motriz elevada – Ruídos e vibrações baixos – Excelente manutenção |
– Preço um pouco elevado | |
| Motor Linear | – Alta velocidade e precisão no controle – Sem conversão mecânica |
– Preço elevado | |
Veja na tabela que sistemas hidráulicos e pneumáticos ainda possuem a vantagem de preço com relação a servo motores. Mesmo assim, já podemos observar várias aplicações em que estes são substituídos por servos, principalmente aplicações hidráulicas que necessitam de precisão.
Nestes casos, os servos se tornam uma boa alternativa visto que não possuem os problemas de vazamento de óleo, poluição do solo e tem a vantagem de serem mais simples e precisos no acionamento se comparado a atuadores hidráulicos.
1 . O que é um Servo Motor?
A principal diferença entre um servo motor e os outros motores (tanto de corrente alternada quanto contínua) é que os servos possuem incorporado neles um encoder e um controlador. Ou seja, os servos nada mais são do que motores comuns com controladores e encoder acoplados.
Avançando um pouco mais na definição, um servo motor é um atuador rotativo ou linear que garante o controle, velocidade e precisão em aplicações de controle de posição em malha fechada.
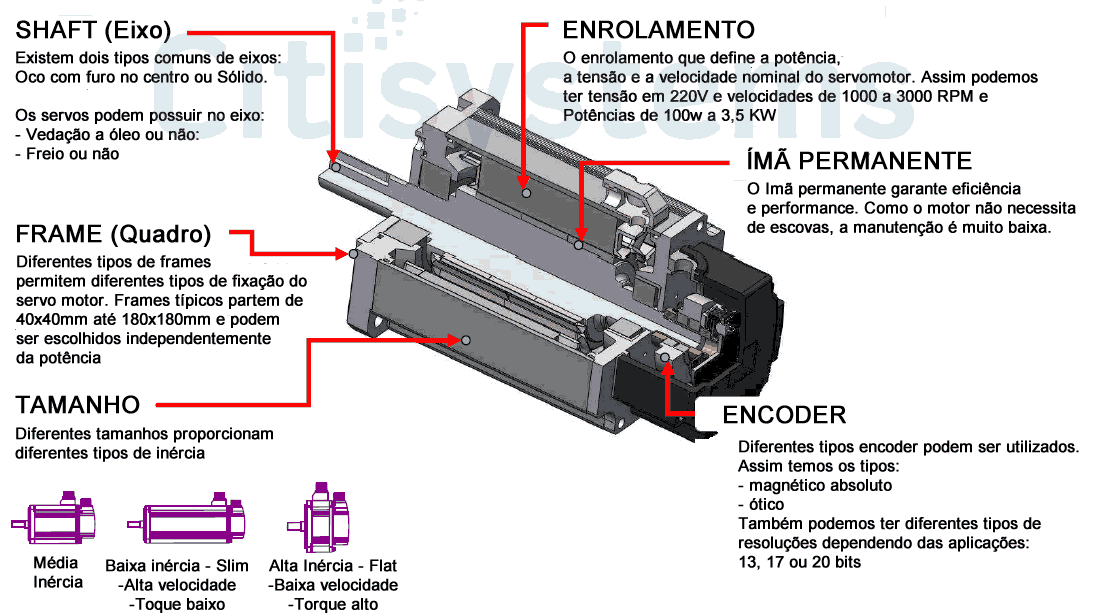
Outra característica que podemos citar é que o servo motor é projetado com pequeno diâmetro e longo comprimento do rotor se diferenciando dos motores convencionais. Vamos ver a seguir como ele funciona:

Figura 1 – Servo motor industrial
O servo motor trabalha com servo-mecanismo que usa o feedback de posição para controlar a velocidade e a posição final do motor. Internamente, um servo motor combina um motor com um circuito de realimentação, um controlador e outros circuitos complementares. Ele usa um codificador ou sensor de velocidade (encoder) que tem a função de fornecer o feedback de velocidade e posição.
O sinal de realimentação por sua vez é comparado com a posição de comando de entrada (posição desejada do motor correspondente a uma carga) e produz o sinal de erro (caso houver uma diferença entre eles). O sinal de erro disponível na saída do detector de erro não é suficiente para accionar o motor. Assim, o detector de erro alimenta um servo amplificador que eleva a tensão e o nível de potência do sinal de erro e então gira o eixo do motor para a posição desejada.
2 – Tipos de Servo Motores
Basicamente, os servo motores são classificados em CA (corrente alternada) e CC (corrente contínua), dependendo da natureza da alimentação de energia necessária para sua operação.
Os servo motores CC são de imã permanente com escova e é empregado em projetos menores devido ao seu custo, eficiência e simplicidade. Já os servos CA são mais frequentemente utilizados na indústria por suportar aplicações que demandam maior potência e fornecer exatidão elevada no seu controle e baixíssima manutenção.
Os servos CA podem ser divididos em 2 categorias: Os síncronos e os de indução. Temos ainda um terceiro tipo que por sua vez é mais empregado em aplicações menores (o motor de passo). Veja na Figura abaixo os tipos de servoacionamento que podem ser encontrados atualmente no mercado:
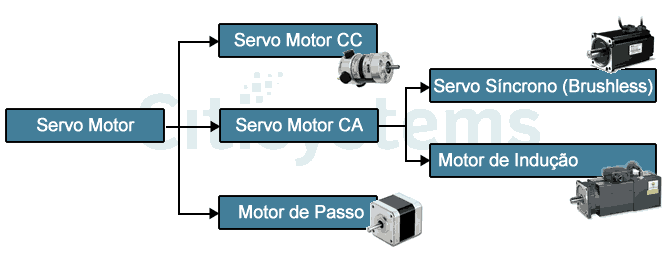
Figura 2 – Tipos de Servo Motores.
Abaixo, temos uma tabela onde é possível visualizar as potência suportadas por cada tipo, bem como vantagens de desvantagens de cada tipo de servoacionamento:
| Característica | Motor de Passo | Servo motor CC | Servo Motor CA Síncrono | Servo Motor CA Indução |
| Capacidade (watts) | – Menor de 100W | – Menor do que 500W | – De 100 a 3,5 KW | – Acima de 3,5 KW |
| Vantagens | – Compacto – Custo reduzido |
– Pequena dimensão externa – Alto torque – Boa eficiência e controle Custo acessível |
– Alta Velocidade – Alto torque – Boa eficiência operacional – Baixa manutenção |
– Alta Velocidade – Altos picos de torque – Boa eficiência operacional – Baixa manutenção – Durabilidade |
| Desvantagens | – Ruído magnético – Baixa velocidade |
– Limite na retificação – Baixa confiabilidade – Maior manutenção |
– Custo alto | – Baixa eficiência em capacidades menores – Controle complexo – Custo elevado |
3 – Com Corrente Contínua CC
Um servo motor CC consiste em um conjunto de um pequeno motor de corrente contínua, um potenciômetro de realimentação, uma caixa de engrenagem e pelo circuito eletrônico do acionamento e loop de controle.
Um servo motor CC é semelhante a um motor de corrente contínua normal sendo que o estator dele é constituído por uma estrutura cilíndrica e o ímã é acoplado ao interior de sua armação. Veja Figura abaixo:

Figura 2 – Servo Motor de Corrente Continua (CC)
Na Figura 2 podemos visualizar o rotor do servo motor CC que consiste de escova e eixo. Um comutador e uma estrutura de suporte de metal que se encaixam no rotor, estão ligados à carcaça externa e o enrolamento de armadura é enrolado na estrutura do suporte de metal do rotor.
Uma escova é construída com uma bobina do induzido que fornece a corrente ao comutador. Na parte de trás do eixo, um encoder é incorporado no rotor, a fim de detectar a velocidade de rotação.
Com esta construção de motor, fica mais simples projetar um controlador usando circuitos simples porque o torque é proporcional à quantidade de fluxo de corrente através da armadura.
Outra característica deste servo motor é que a polaridade instantânea da tensão de controle decide a direção do torque desenvolvido pelo motor. Tipos de servo motores CC incluem: motores de série, motor de derivação de controle, motor de derivação em série e motor de derivação de ímã permanente. Veja abaixo um vídeo da construção de um servo CC tipo RC para pequenas aplicações.
3.1 – Princípio de Funcionamento do Servo Motor CC
Como vimos, um servo CC é um conjunto de quatro componentes principais: motor de corrente contínua, um dispositivo de detecção de posição, um conjunto de engrenagens e um circuito de controle. A figura abaixo mostra as peças que compõem servomotores RC (o mesmo do vídeo acima) onde um motor CC pequeno é empregado para acionar a pequenas cargas com velocidade e posição precisas.
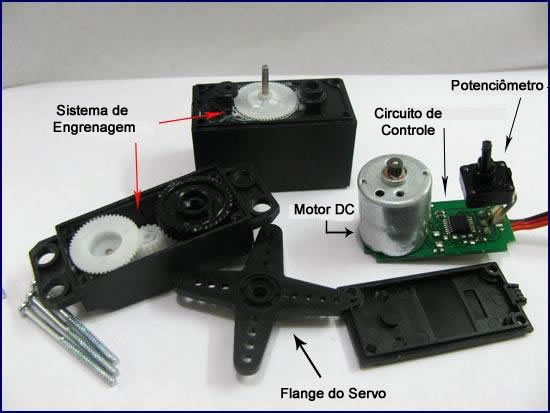
Figura 3 – Partes de um Servomotor CC tipo RC
No tipo de servomotor RC, uma tensão de referência CC é ajustada para o valor correspondente à saída desejada. Esta tensão pode ser aplicada utilizando um potenciômetro, um gerador de largura de pulso de controle (PWM) para o conversor de tensão, ou através de temporizadores dependendo do circuito de controle. A regulagem do potenciômetro produz uma tensão correspondente que é então aplicada na entrada do amplificador de erro.
Em alguns circuitos, é utilizado um impulso de controle para produzir uma tensão de referência CC correspondente à posição ou velocidade desejada do motor que é aplicada a um conversor de largura de pulso (PWM).
Neste conversor, o capacitor começa a carregar a uma taxa constante quando o pulso é alto. Então a carga no capacitor alimenta o amplificador buffer quando o pulso está baixo e esta carga é ainda aplicada ao amplificador de erro.
Dessa forma, o comprimento do pulso soluciona a tensão aplicada no amplificador de erro como uma tensão desejada para produzir a velocidade ou posição desejada.
No controle digital, microprocessador ou microcontrolador são utilizados para gerar os pulsos de PWM para produzir sinais de controle mais precisos. Veja abaixo um diagrama mostrando como é feito o controle:
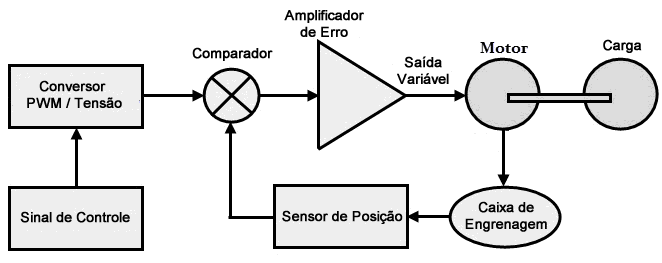
O sinal de realimentação correspondente à posição atual da carga é obtido utilizando um sensor de posição. Este sensor é normalmente um potenciômetro que produz a tensão correspondente ao ângulo absoluto do eixo do motor através do mecanismo de engrenagem. Então o valor de tensão de realimentação é aplicado na entrada do amplificador de erro (comparador).
O amplificador de erro é um amplificador de realimentação negativa e tem a função de reduzir a diferença entre suas entradas. Ele compara a tensão relacionada à posição atual do motor (obtida pelo potenciômetro) com a tensão desejada relacionada à posição desejada do motor (obtida pela largura de pulso ao conversor de tensão), e produz o erro em forma de tensão positiva ou negativa.
Esta tensão de erro é aplicada à armadura do motor. Se o erro for maior, mais saída é aplicada à armadura do motor. Enquanto o erro existir, o amplificador amplifica a tensão de erro e, consequentemente, a energia da armadura. O motor gira até que o erro se torne zero. Se por outro lado o erro for negativo, a tensão da armadura inverte e, neste caso, a armadura gira na direção oposta.
4 – Com Corrente Alternada CA
Com vimos, existem dois tipos distintos de servo motor CA: síncrono e de indução:
O motor de indução (gaiola de esquilo) possui o seu motor construído de alças de fio encurtadas em uma armadura giratória. A tensão é “induzida” no rotor através de indução eletromagnética.
A principal diferença do servo motor de indução com um motor de indução comum é que o rotor da gaiola do servo é construído com barras condutoras mais finas, de modo que a resistência do servo motor seja menor do que a de um motor de indução comum.
Eles são robustos, versáteis e podem fornecer potência considerável, sendo mais encontrados em aplicações maiores pois não possuem bom rendimento a baixas potências.
O servo motor CA síncrono é o mais encontrado na indústria e é composto de estator e rotor. Seu estator consiste em uma estrutura cilíndrica e núcleo, sendo que a bobina de indução é enrolada em volta do núcleo do estator e a extremidade da bobina é ligada a um fio condutor através do qual é fornecida corrente ao motor.
O rotor é constituído por um ímã permanente e assim o servo motor não depende do tipo de indução de corrente alternada no rotor. O servo motor CA também pode ser chamado de brushless (sem escova) por causa de suas características estruturais.
Abaixo, podemos ver uma figura de um servo motor síncrono e suas características:
4.1 – Princípio de Funcionamento do Servo Motor CA
Um diagrama esquemático do sistema de servo motor de indução bifásico CA é mostrado na figura abaixo abaixo:
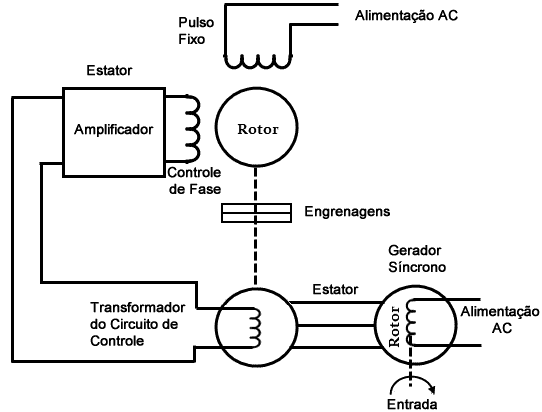
Neste nosso exemplo, para representar a posição desejada de referência, utilizamos um gerador síncrono em que ao girarmos o seu eixo, setamos a posição de referência.
Funciona da seguinte forma: a entrada de referência que desejamos é dada por um ângulo teta do eixo do rotor de um gerador síncrono. O rotor do gerador síncrono por sua vez é alimentado com tensão e frequências fixas.
Os três terminais do estator do gerador síncrono são então ligados aos terminais do transformador do circuito de controle. Assim, a posição angular do rotor (posicão desejada) do gerador síncrono é transmitida para o circuito de controle.
Inicialmente, existe uma diferença entre a posição do eixo do gerador e a posição do eixo do transformador de controle, que nomeamos de erro. Este erro é refletido em tensão através do transformador de controle e por sua vez é amplificado antes de ir para o controle de fase do servo motor.
Com a tensão de controle, o rotor do servomotor gira na direção necessária para que o erro torne-se zero. Este é o princípio básico de como é assegurada a posição do eixo de servomotores CA.
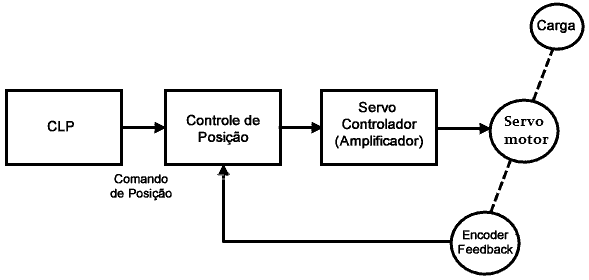
Na prática, a maioria dos servo drives modernos possuem CLPs e microprocessadores embutidos que geram frequência e tensão variável a fim de movimetnar o motor.
Para este controle são utilizadas as técnicas PWM e controle PID. O diagrama de blocos do sistema de servo motor CA utilizando controladores lógicos programáveis, controladores de posição e servo controladores é apresentado a seguir:
Referências:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}