Neste artigo falaremos sobre os 6 principais tipos de robôs industriais mais conhecidos atualmente: Cartesiano, SCARA, Cilíndrico, Delta, Polar e Verticalmente Articulado. Sabemos que inúmeras empresas de manufatura aplicam em suas linhas de produção robôs industriais com o intuito de automatizar tarefas, aumentar a segurança do trabalhador e aumentar a produção em geral, reduzindo com isto os custos operacionais e o desperdício.
Com estes robôs tornando-se mais predominantes nos ambientes de produção, temos tido um aumento na demanda por diferentes tipos de robôs industriais visando atender aplicações e indústrias específicas. Aqui neste artigo, vamos explorar quais são estes tipos de robôs que estão disponíveis no mercado, como eles funcionam e em quais aplicações ou setores são normalmente usados. Também falaremos sobre os principais tipos de configuração e vantagens e desvantagens dos diferentes tipos de robôs.
Os 6 Principais Tipos de Robôs Industriais

Figura 1 – Diferentes Tipos de Robôs
1 – O Robô Articulado
Os tipos de robôs articulados são mais aplicados na indústria. Ele possui esse nome pois assemelha-se a um braço humano em sua configuração mecânica. O braço é conectado à base com uma junta de torção que possibilita o giro do robô. O número de juntas rotativas que conectam os elos do braço pode variar de duas juntas a dez juntas e cada articulação fornece um grau adicional de liberdade. As juntas também são chamadas de eixos e assim frequentemente ouvimos falar em robô de 4 eixos, robô de 6 eixos referindo-se ao número de juntas. As articulações podem ser paralelas ou ortogonais entre si. Dentre os tipos de robôs articulados, os com seis graus de liberdade são os robôs industriais mais usados, pois seu design oferece máxima flexibilidade se comparado com os de menores eixos.

Figura 2 – Tipos de Robôs Articulados
Vantagens
- Alta velocidade
- Mais flexibilidade para aplicações que requerem menos espaço
- Mais fácil de alinhar a várias coordenadas (X,Y,Z)
Desvantagens
- Requer um controlador de robô dedicado
- A Programação é mais complicada
- A Cinemática complicada
Aplicações
- Embalagem de alimentos
- Soldagem a arco
- Soldagem a ponto
- Manuseio de materiais
- Alimentação de máquinas
- Montagem automotiva
- Paletização
- Corte de aço
- Manipulação de vidro
- Fundição e aplicação de forjamento
2 – O Robô Cartesiano
Os tipos de robôs cartesianos também são chamados de robôs retilíneos ou de gantry e possuem uma configuração retangular. Esses tipos de robôs industriais possuem três juntas prismáticas com o objetivo de fornecer o movimento linear deslizando em seus três eixos perpendiculares (X, Y e Z). Eles também podem ter um deslocamento combinado para permitir o movimento de rotação. Os robôs cartesianos são usados na maioria das aplicações industriais, pois oferecem flexibilidade em sua configuração, o que os torna adequados para necessidades de aplicações específicas.

Figura 3 – Tipos de Robôs Cartesianos
Vantagens
- Fornece precisão de posição
- Operação simples
- Fácil de programar offline
- Altamente personalizável
- Pode lidar com cargas pesadas
- Menor custo
Desvantagens
- Requer grande área operacional e de instalação
- Montagem complexa
- Movimento limitado a apenas uma direção de cada vez
Aplicações
- Operações de escolher e colocar
- Carregando e descarregando
- Manuseio de materiais
- Montagem e submontagem
- Manipulação de materiais nucleares
- Aplicações adesivas
3 – O Robô Cilíndrico
Os tipos de robôs cilíndricos possuem pelo menos uma junta rotativa na base e pelo menos uma junta prismática para conectar os elos. A junta rotativa usa um movimento de rotação ao longo do eixo da junta, enquanto a junta prismática se move em um movimento linear. Robôs cilíndricos operam dentro de um envelope de trabalho de formato cilíndrico.

Figura 4 – Tipos de Robôs Cilíndricos
Os Robôs cilíndricos possuem pelo menos uma articulação rotativa na base e pelo menos uma articulação prismática conectando os elos. Esses robôs têm um espaço de trabalho cilíndrico com um eixo de articulação e um braço extensível que se move verticalmente e ao mesmo tempo deslizando. Assim, robôs com configuração cilíndrica oferecem movimento linear vertical e horizontal juntamente com movimento rotativo em torno do eixo vertical. O design compacto da extremidade do braço permite que o robô alcance ranges apertados de trabalho sem perda de velocidade e repetibilidade. É usado principalmente em aplicações simples, onde os materiais são recolhidos, girados e colocados.
Vantagens
- Operação e instalação simples
- Montagem mínima
- Pode alcançar tudo ao seu redor
- Requer menos espaço
- Pode transportar grandes cargas
Desvantagens
- Não consegue pular obstáculos
- Baixa precisão na direção do movimento rotativo
- Caído em desuso e não muito comum
Aplicações
- Transporte de painéis LCD
- Aplicações de montagem
- Aplicações de revestimento
- Fundição
- Fundição e aplicação de forjamento
- Carregamento e descarregamento de máquinas
4 – O Robô Polar
Os tipos de robôs polares possuem uma junta de torção que liga o braço à base e uma combinação de duas juntas rotativas e uma junta linear conectando os links. Estes tipos de robôs também são chamados de robôs esféricos, uma vez que tem um envelope de trabalho esférico e os eixos formam um sistema de coordenadas polares. Esses robôs têm um eixo de articulação central e um braço giratório extensível. A configuração da torre de revólver dos robôs polares varre um grande volume de espaço, mas o acesso do braço é restrito em seu espaço de trabalho.

Figura 5 – Tipos de Robôs Polares
Vantagens
- Pode alcançar tudo ao redor
- Pode alcançar acima ou abaixo dos obstáculos
- Grande volume de trabalho
- Requer menos espaço
Desvantagens
- Não pode alcançar acima de si
- Alcance vertical curto
- Baixa precisão e repetibilidade na direção do movimento rotativo
- Requer sofisticado sistema de controle
- Caído em desuso e não comum em novos designs
Aplicações
- Fundição
- Manipulação de vidro
- Empilhamento e desempilhamento
- Moldagem por injeção
- Forjamento
- Soldadura
- Manuseio de materiais
5 – O Robô SCARA
Comumente usado em aplicações de montagem, estes tipos de robôs possuem duas juntas paralelas que fornecem conformidade em um plano onde será instalado. Os robôs SCARA (Conjunto de Conformidade Seletiva Robot Arm) possuem um range de trabalho em forma de anel como pode ser visto na Figura 6. Os eixos rotativos são posicionados verticalmente e o eixo final preso ao braço se move horizontalmente. Os robôs SCARA são especializados em movimentos laterais e são usados principalmente para montagem devido a fato destes tipos de robôs poderem se mover mais rapidamente e ter integração mais fácil do que robôs cilíndricos e cartesianos.
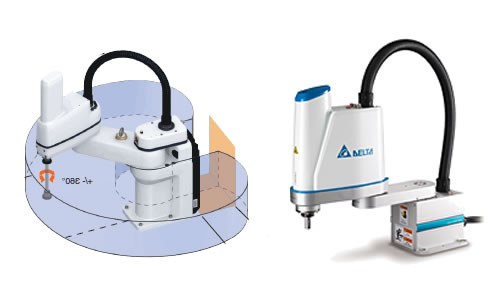
Figura 6 – Robô SCARA
Vantagens
- Alta velocidade
- Excelente repetibilidade
- Espaço de trabalho grande
- Fácil de programar
Desvantagens
- Requer controlador de robô dedicado
- Limitado a superfícies planas
Aplicações
- Manuseio de pastilhas de semicondutores
- Montagem de circuitos
- Aplicação de Cola
- Inspeção
- Aplicações biomédicas
- Embalagem
- Paletização
- Carregamento da máquina
6 – O Robô Delta
Os tipos de robôs delta, parecidos com aranhas, também são chamados de robôs de link paralelo, pois consistem em ligações paralelas de junções conectadas a uma base comum. Devido ao controle direto de cada junta sobre o efetor final, o posicionamento do efetor pode ser controlado facilmente com seus braços, resultando em alta velocidade de operação. Os robôs delta possuem um envelope de trabalho em forma de cúpula. Esses robôs geralmente são usados para aplicações rápidas de coleta e transferência de produtos.

Figura 7 – Robô Delta
Vantagens
- Velocidade muito elevada
- Alta precisão operacional
Desvantagens
- Operação complicada
- Requer controlador de robô dedicado
Aplicações
- Indústria alimentícia
- Indústria farmacêutica
- Indústria eletrônica
- Simuladores de voo
- Simuladores de automóveis
- Alinhamento de fibra óptica




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}