
Um Motor CC nada mais é do que um motor alimentado por corrente contínua (CC), sendo esta alimentação proveniente de uma bateria ou qualquer outra de alimentação CC.
A sua comutação (troca de energia entre rotor e estator) pode ser através de escovas (escovado) ou sem escovas (brushless) e com relação a velocidade, o motor CC pode ser controlado apenas variando a sua tensão, diferentemente de um motor elétrico de corrente alternada (CA) cuja a velocidade é variada pela frequência.
Vejamos mais a frente como funciona este tipo de motor.
Como explicado, os motores elétricos CA necessitam de uma mudança na frequência caso houver a necessidade de variar sua velocidade, envolvendo assim um controle de velocidade mais complexo e dispendioso.
Por outro lado, o motor CC precisa apenas de uma mudança no nível de tensão para que possamos variar sua velocidade- Assim, ele torna-se mais adequado para equipamentos alimentados por níveis de tensão de 24 Vcc ou 12 Vcc como no caso dos automóveis, ou aplicações industriais que exigem um controle fino de velocidade.
Ao selecionar um motor CC, é fundamental que você identifique as principais especificações de desempenho, além dos requisitos de potência e tamanho. Também é importante considerar os requisitos ambientais para a sua aplicação.
Este artigo foi escrito de forma a explicar como o motor CC funciona e visa facilitar o processo de seleção de motores elétricos de corrente contínua.
Assim, após entender os conceitos envolvidos no funcionamento, vamos poder analisar quais são as características importantes para a correta especificação de um motor CC.
1 – Como Funciona o Motor CC?
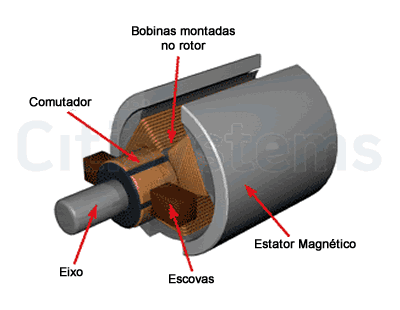
Figura 1 – Motor CC e suas partes.
Um motor CC é composto por um eixo acoplado ao rotor que é a parte girante do motor. Na Figura 1, o estator é composto por um ímã e o comutador tem a função de transferir a energia da fonte de alimentação ao rotor. Na Figura 1 é também é possível observar as partes que compõem um motor CC.
1.1 – O Princípio de Funcionamento
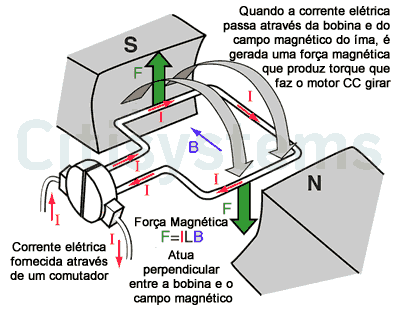
Figura 2 – Princípio de Funcionamento Motor CC
Na Figura 2, o estator é constituído pelos ímãs (norte e sul) e o rotor é representado por uma bobina que é alimentada pelo comutador em que circula uma corrente I.
O princípio básico de funcionamento do motor CC é o seguinte: “Sempre que um condutor conduzindo uma corrente elétrica (em vermelho) é colocado em um campo magnético (em azul), este condutor experimenta uma força mecânica (em verde)”, gerando o torque e o giro do eixo do motor.
1.2 – A Corrente
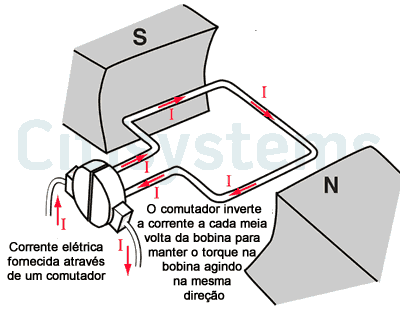
Figura 3 – A corrente no Motor CC
Ao alimentar o comutador com tensão CC, é gerada uma corrente contínua que é transferida para a bobina através do contato das escovas do comutador com esta bobina.
Assim, a função do comutador é ser o elo entre a fonte de alimentação e o rotor do motor CC e ele é composto por escovas condutoras que fazem o contato com o eixo girante do motor CC. Aqui, chamamos a corrente que circula pela bobina de I.
1.3 – O Campo Magnético
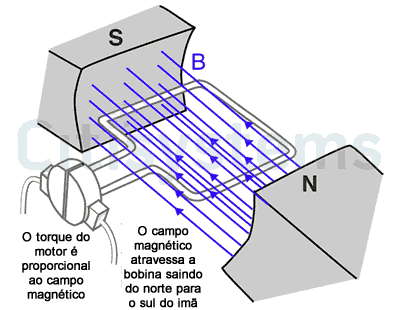
Figura 4 – O campo magnético no Motor CC
O campo magnético é gerado entre os polos norte e sul do ímã e possui um sentido partindo do norte para o sul.
O torque que vai impulsionar a bobina e por sua vez, o rotor, como podemos observar na Figura 5 será proporcional ao campo magnético entre os ímãs. A densidade de fluxo magnético é chamada aqui de B.
1.4 -A Força e o Torque do motor cc

Figura 5 – A força e o torque no Motor CC
A direção da força mecânica é dada pela regra da mão esquerda de Fleming e sua magnitude é dada por:

Figura 6 – Regra da mão esquerda.
F = ILB, onde:
- B = densidade de fluxo magnético,
- I = corrente da bobina,
- L = comprimento do condutor no campo magnético
Para que você entenda melhor como funciona um motor CC, veja o vídeo abaixo:
2 – Especificação de um Motor CC
2.1 – Especificações Básicas ou Primárias
Existem três fatores principais que você precisa levar em consideração quando for selecionar um Motor CC: A velocidade, o torque e a tensão. Sabendo estas três especificações, você será capaz de saber qual o motor e fabricante atenderá suas necessidades.
Velocidade do eixo: um motor CC aplica uma tensão (V) para rodar um eixo a uma velocidade de rotação proporcional (ω). As especificações de velocidade do eixo geralmente se referem à velocidade sem carga, que é a velocidade máxima que o motor pode alcançar quando não há torque aplicado.
Tipicamente, a velocidade do eixo é dada em rotações ou rotações por minuto (RPM). Estas rotações ou revoluções também podem ser representadas em radianos por segundo (rad/s) e para cálculos numéricos, o valor em radianos pode ser mais conveniente. A seguinte fórmula descreve a relação entre radianos por segundo e rotações ou rotações por minuto.
ωrad/s = ωrpm · (2π/60)
Para um motor CC ideal (que não possui perdas), a velocidade rotacional é proporcional à tensão fornecida, sendo:
ω = j · V
onde j é uma constante de proporcionalidade, dada em rad/(s.V).
Torque de saída: A rotação do eixo gera uma força de rotação chamada torque (τ). O torque é dado em unidades de força-distância (lb-ft, oz-in, N-m, etc.) ele pode ser de dois tipos: torque de partida ou torque contínuo. O torque de partida é o τ no qual a velocidade do eixo é zero ou o motor está parado.
Já o torque contínuo é o máximo τ em condições normais de funcionamento. Observe abaixo pela fórmula que o torque (τ) de um motor CC é proporcional à corrente de indução (I), sendo que neste caso temos a constante de torque (k). A seguinte equação descreve as relações entre torque e corrente.
τ = k · I ou I = τ / k
A importância da constante de torque é evidenciada na equação acima. Para um dado torque, um valor alto de k limita a corrente a um valor baixo.
Esta é uma medida de eficiência, uma vez que um menor consumo de corrente significa menor dissipação de energia (calor).
Conhecendo a constante de torque e o torque produzido podemos calcular a corrente através da armadura, que é utilizada para sabermos a classificação de temperatura (como será mostrado mais adiante). Como o toque é proporcional à velocidade, podemos traçar um gráfico de torque X velocidade conforme Figura 7:

Figura 7 – Torque x velocidade
Tensão disponível: os motores de corrente contínua podem ser projetados para operar a uma tensão específica caso houver a necessidade. No entanto, sempre devemos observar a disponibilidade de fonte de alimentação adequada para cada aplicação.
As fontes de alimentação mais comuns no mercado são 12Vcc e 24Vcc, mas é comum, conversores que realizam a retificação de tensões em 110V e 220V a fim de fornecer qualquer nível de tensão necessário para a sua aplicação.
Não se esqueça que como a velocidade depende da tensão, a alimentação poderá ser um limitante caso não for feita uma especificação adequada do motor CC.
2.2 – Especificações Derivadas ou Secundárias
As folhas de dados dos motores CC também possuem parâmetros que são derivados ou relacionados com os requisitos fundamentais (tensão, velocidade e torque). Podemos citar:
Potência de saída: Uma especificação comum e importante é a potência nominal de saída (Po) que representa o produto do torque pela velocidade do motor. Na forma de equação, a potência de saída é dada por:
Po = τ · ω
A potência máxima de saída ocorre quando o motor está em 50% da velocidade sem carga e 50% do torque de parada e muitos fornecedores especificam a potência de saída em termos de CV ou HP.
Lembre-se que para converter um valor calculado de potência de unidades de watts (W) para unidades de HP, divida a potência em Watts por 746.
Dissipação de potência: A corrente produzida em um motor de corrente contínua aquece o mesmo e cria uma potência dissipada (Pdis).
O valor de Pdis está relacionado com a resistência total do sistema (RT), que é a resistência de todo o conjunto do motor incluindo as perdas por atrito no estator (Rstator) e no rotor (Rrotor).
Através da corrente do motor, podemos calcular a dissipação de potência e, por sua vez, o aumento da temperatura do rotor (ΔT) devido à rotação.
A partir de ΔT, a temperatura total do motor (TM) pode ser calculada pela adição da temperatura ambiente (Tamb). As seguintes equações ilustram os passos utilizados para calcular a temperatura final do motor:
Pdis = I2RT
RT = Rrotor + Rstator (exceto para o motor cc de íma permanente)
ΔT = Pdis(Rtot)
TM = Tamb + ΔT
2.3 – Parâmetros de Construção do motor cc
A adequação de um motor CC para uma aplicação também depende da sua construção, outro aspecto do processo de seleção. Existem vários tipos diferentes de motores de corrente contínua, cada um dos quais oferece vantagens e desvantagens com base na sua construção. Vejamos abaixo as características de cada um no que tange à construção:
Os Motores de Derivação apresentam variação mínima de velocidade através da faixa de carga e podem ser configurados para potência constante em uma faixa de velocidade ajustável.
Eles são usados para aplicações onde há necessidade de controle preciso de velocidade e torque.
Na Figura abaixo você pode ver uma curva típica de velocidade x torque para um motor de derivação, onde o torque permanece relativamente constante em uma grande faixa de velocidade.

Figura 8 – Torque x Velocidade para o Motor Bobinado em Derivação.
Os Motores Bobinados em Série exibem altos torques de partida para cargas permanentemente conectadas que são necessárias a fim de evitar danos em condições de alta velocidade. Estes motores desenvolvem um grande torque e podem ser operados a baixas velocidades.
Eles são mais adequados para aplicações industriais pesadas que exigem cargas maiores movendo-se lentamente ou cargas mais leves movendo-se rapidamente. Abaixo, podemos ver uma curva típica de velocidade x torque para motores com bobina em série:
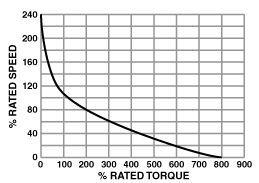
Figura 9 – Torque x Velocidade para o Motor Bobinado em Série.
Os Motores Bobinados Compostos são projetados com bobinas derivadas compostas para aplicações de velocidade constante que requerem torque mais elevado. Eles são frequentemente usados onde a carga primária requer um torque de partida alto e a velocidade ajustável não é necessária.
As aplicações incluem elevadores, guindastes e equipamentos para lojas industriais. Abaixo podemos ver uma curva típica de velocidade x torque para os motores de bobina compostos, combinando características de derivação em série:
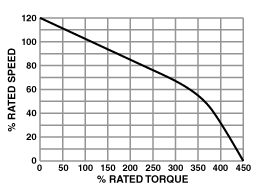
Figura 10 – Torque x Velocidade para o Motor Bobinado Composto.
Motores CC de ímã permanente possuem um ímã permanentemente embutido em sua montagem (no estator). Eles oferecem velocidade constante com carga variável (escorregamento zero) e excelente torque de partida. Comparado com os outros tipos, a construção de ímã permanente proporciona maior eficiência e menores ajustes de velocidade.
Abaixo podemos ver uma curva de velocidade para motores de ímã permanente, com proporcionalidade de torque e velocidade linear.
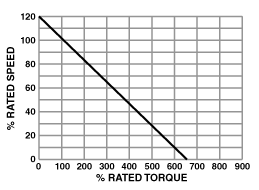
Figura 11 – Torque x Velocidade para o Motor Íma Permanente.
Motores CC com armadura em forma de disco, também chamados de “panquecas” ou “discos impressos”, utilizam rotores planos movidos por um campo magnético alinhado axialmente. Sua construção fina permite baixa inércia, resultando em alta aceleração.
Esses motores são bons para aplicações que exigem uma rápida inicialização e desligamento enquanto acoplados a uma carga constante, como em um veículo elétrico. Veja abaixo o desenho de uma armadura a disco:
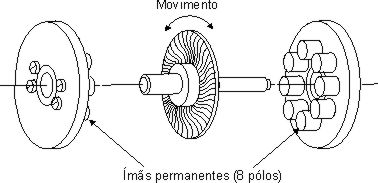
Figura 12 – Armadura em Forma de Disco
Os Motores CC sem Núcleo e sem ranhura incorporam um enrolamento cilíndrico que está fisicamente fora de um conjunto de ímãs permanentes. Devido ao fato do enrolamento ser laminado e não existir gaiola de ferro, motores cc sem núcleo possuem inércia muito menor.
Possuem alta aceleração, eficiência e excelente controle de velocidade com pouca ou nenhuma vibração. Eles são comumente usados como servo motor para aplicações de controle de processo.
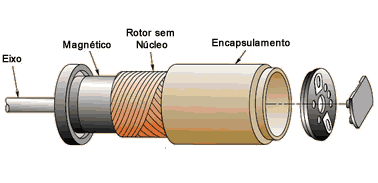
Figura 13 – Motor sem núcleo.
Comutação do motor cc
A comutação do motor de CC pode ser com ou sem escovas (brushless), sendo que cada tipo oferece vantagens específicas.
Os motores elétricos escovados usam escovas de contato que se conectam com o comutador para alimentar o rotor. A construção escovada é menos onerosa do que o motor sem escovas e o controle é mais simples e barato.
Outra característica é que o escovado pode operar em ambientes extremos devido à sua ausência interna de componentes eletrônicos. Por outro lado, motores escovados exigem manutenção periódica para substituição das escovas desgastadas.
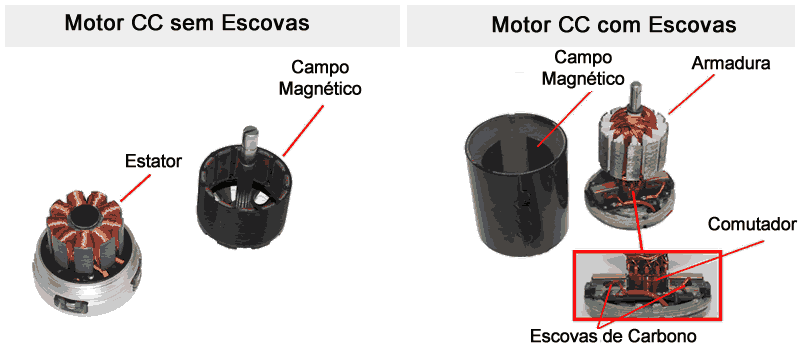
Figura 14 – Motor CC com e sem escovas.
Os motores sem escovas ou Brushless usam um ímã permanente incorporado no conjunto do rotor. Eles podem usar um ou mais dispositivos de Efeito Hall para detectar a posição do rotor e uma eletrônica de acionamento associada a ele controla a rotação do eixo (velocidade). Os motores Brushless são similares aos motores CA, mas são comutados eletronicamente (ESM) de modo que possam ser alimentados em CC.
A comutação sem escovas (Brushless) é mais eficiente, requer menos manutenção, gera menos ruído e tem uma maior densidade de potência e faixa de velocidade se comparado ao motor de comutação escovada. No entanto, a eletrônica dos motores brushless geralmente contribuem para o seu custo de aquisição, que também possuem maior complexidade e maiores limitações ambientais.
2.4 – Tamanho e Considerações Ambientais
Ao selecionar motores de corrente contínua, você deve considerar também o design e os fatores ambientais como veremos a seguir:
2.4.1 – Considerações de dimensionamento
Se um motor CC tiver que se encaixar em um espaço ou satisfazer uma exigência de peso, então as características físicas podem ser fatores de seleção importantes. A configuração do eixo e o redutor, caso for aplicado também são considerações que devem receber atenção.
A configuração do eixo determina como o motor é montado e conectado ao sistema que ele irá acionar e é essencial sua correta seleção de forma com que ele seja compatível com o sistema. A seleção ideal do eixo aumenta a eficácia e pode economizar tempo e custo durante a montagem. As configurações podem incluir tipos côncavos, redondos, quadrados, sextavados, ranhurados, em degrau ou parafusos.
A redução ou redutor é usada no motor CC para aumentar ou reduzir a velocidade do eixo mecanicamente. Utilizando o redutor, o motor tende a ter volume ou peso menor. Os tipos de redutores que são usados em motores elétricos de corrente contínua podem incluir redutores de engrenagem, planetários, sem-fim ou cônicos.
2.4.2 – Considerações ambientais
Finalmente, ao selecionar o motor de corrente contínua, você pode ter que considerar as condições ambientais ou requisitos de aplicação quando da utilização do produto.
A temperatura de operação deve ser considerada quando se utiliza algum equipamento eletrônico sensível ou quando o ambiente não está à temperatura de 40°C, ou ainda quando o ambiente for sensível à dissipação de calor do motor. Mecanismos de refrigeração adicionais podem ser instalados para neutralizar o aquecimento excessivo do motor ou do ambiente circundante.
A proteção contra corrosão deve ser considerada em ambientes onde o motor está exposto a radiação, poeira ou substâncias perigosas que possam degradar o motor. O invólucro e os materiais apropriados do motor podem ser selecionados para assegurar proteção contra a contaminação.
A proteção da água deve ser considerada quando um motor for operar exposto à água. Os níveis de proteção vão desde a proteção contra gotejamento vertical mínimo até à submersão total sob pressão.
Referências de artigo do Motor CC:
- Integrated Publishing – Types of DC Motors
- EC&M Magazine – Motor Temperature Ratings
- Plant Engineering – How To Select A DC Electric Motor
- MicroMo – How To Select A DC Motor
- Dynetic Systems – Brushless vs. Brushed
- Baldor – Basic Motor Theory, Figures 2-5
- Hyperphysics
- GlobalScpec
- EletricalEasy
- Eletrical4u




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}