PWM (Pulse Width Modulation) refere-se ao conceito de pulsar rapidamente um sinal digital em um condutor. Além de várias outras aplicações, esta técnica de modulação pode ser utilizada para simular uma tensão estática variável e é comumente aplicada no controle de motores elétricos, aquecedores, LEDs ou luzes em diferentes intensidades ou frequências.
Um dispositivo digital como um microcontrolador pode trabalhar com entradas e saídas que possuem apenas dois estados: ligado ou desligado. Assim, você pode facilmente usá-lo para controlar o estado de um LED por exemplo ligando ou desligando o mesmo. Da mesma forma que você pode usá-lo para controlar qualquer dispositivo elétrico usando dispositivos adequados (transistor, triac, relés etc).
No entanto, às vezes você precisa de mais do que apenas “ligar” e “desligar” no controle de dispositivos. Caso você deseje controlar o brilho de um LED (ou qualquer lâmpada) ou a velocidade de um motor elétrico CA, simplesmente não será possível aplicando somente o controle (ligar/desligar). Para contornar esta situação, habilmente foi desenvolvida a técnica chamada PWM ou Pulse Width Modulation.
PWM é a técnica usada para gerar sinais analógicos de um dispositivo digital como um Microcontrolador e ela é tão eficiente que hoje em dia quase todos os Microcontroladores modernos possuem hardware dedicado para a geração de sinais PWM. Neste artigo você vai aprender os conceitos básicos desta técnica e como ela pode ser amplamente aplicada no controle de dispositivos e até máquinas como ocorre no inversor de frequência.
1 – O Controle Analógico
Um sinal analógico é aquele que possui o seu valor variando continuamente com resolução infinita em tempo e magnitude. Uma bateria de 9 volts é um exemplo de um dispositivo analógico em que sua tensão de saída não é precisamente 9V, mudando ao longo do tempo e podendo assim, ter qualquer valor real numérico.
O que quero dizer aqui é que a quantidade de corrente extraída de uma bateria não está limitada a um conjunto finito de valores possíveis (0 ou 1 por exemplo).
É fácil perceber que os sinais analógicos são distinguíveis dos sinais digitais pois estes últimos sempre tomam valores de um conjunto finito de possibilidades predeterminadas, como o conjunto (0V, 5V). Neste caso, ou está ligado (5V) ou desligado (0V).

Figura 1 – Sinais analógicos e digitais.
Tensões e correntes analógicas podem ser utilizadas para controlar sistemas diretamente, como o volume de um rádio. Em um rádio analógico simples, o botão de volume é conectado a uma resistência variável.
Ao girar o botão, a resistência aumenta ou diminui e quando isso acontece, a corrente que flui através do resistor também aumenta ou diminui. Isso altera a quantidade de corrente que flui para os alto-falantes, aumentando ou diminuindo o volume. Um circuito analógico é como o rádio em que a saída é linearmente proporcional à sua entrada.
Mesmo parecendo intuitivo e simples, o controle analógico nem sempre é economicamente viável ou de certa forma prático. Adicionalmente, os circuitos analógicos tendem a variar ao longo do tempo e, portanto, podem ser passíveis de ajustes.
Devido a este problema, foram criados circuitos analógicos de precisão que resolvem isso mas por outro lado são muito grandes, pesados e caros (basta lembrarmos de como eram os equipamentos antigos).
Outra questão é que os circuitos analógicos podem sofrer por aquecimento pois a potência dissipada neles é proporcional à tensão entre os elementos ativos multiplicada pela corrente que flui através do circuito.
Por fim, os circuitos analógicos podem ainda serem sensíveis ao ruído e devido à sua resolução infinita, qualquer perturbação ou ruído em um sinal analógico necessariamente altera o seu valor.
2 – O Controle Digital
Ao controlar os circuitos analógicos digitalmente, os custos do sistema e o consumo de energia podem ser drasticamente reduzidos. Como falei anteriormente, devido à eficiência deste tipo de controle, muitos microcontroladores e DSPs já incluem controladores PWM no chip, facilitando esta implementação.
O PWM nada mais é do que uma maneira de codificar digitalmente níveis de sinal analógico. Nesta técnica, através do uso de contadores de alta resolução, o ciclo de trabalho de uma onda quadrada é modulado para codificar um nível de sinal analógico específico para que então ele atenda os requisitos de uma aplicação desejada.
O sinal PWM é totalmente digital porque em qualquer dado instante de tempo, a alimentação CC ou está totalmente ligada ou completamente desligada. A fonte de tensão ou de corrente é fornecida à carga analógica por meio de uma série repetitiva de impulsos de ligar e desligar.
O tempo de ativação é o tempo durante o qual a alimentação CC é aplicada à carga e o tempo de desativação é o período durante o qual a alimentação é desligada. Dada uma largura de banda suficiente, qualquer valor analógico pode ser codificado com PWM.
A Figura 2 mostra três sinais PWM diferentes sendo que a primeira (a) mostra uma saída PWM a um ciclo de trabalho de 10%. Ou seja, o sinal está ligado para 10% do período e desligado nos outros 90%. As Figuras 2b e 2c mostram as saídas PWM a ciclos de trabalho de 50% e 90%, respectivamente.
Estas três saídas PWM codificam três diferentes valores de sinal analógico, a 10%, 50% e 90% da energia de entrada. Se, por exemplo, a alimentação for 9V e o ciclo de trabalho for 10%, teremos um sinal analógico 0.9V.
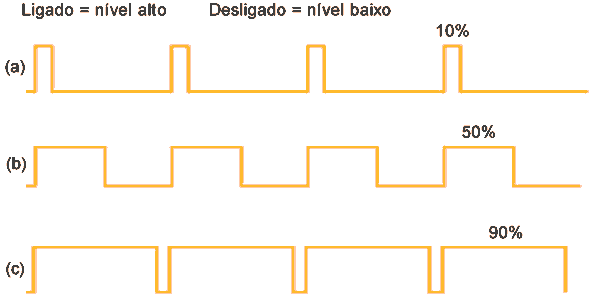
Figura 2 – Sinal PWM.
Vamos a um exemplo: A Figura 3 mostra um circuito simples que poderia ser controlado usando PWM. Na Figura, uma bateria de 9V alimenta um diodo emissor de luz (LED) e se fecharmos o interruptor que liga a bateria no LED durante 50ms, o LED recebe 9V durante esse intervalo.
Por outro lado, se abrimos o interruptor para os próximos 50ms, o LED recebe 0V. Se repetirmos este ciclo 10 vezes por segundo, o LED ficará aceso como se estivesse ligado a uma bateria de 4.5V (50% de 9V). Dizemos que o ciclo de trabalho é de 50% e a frequência de modulação é de 10Hz.

Figura 3 – PWM em um circuito com LED.
A maioria das cargas indutivas e capacitivas requerem uma freqüência de modulação muito maior do que 10Hz. Imagine que nossa lâmpada foi ligada por cinco segundos, depois desligada por cinco segundos e este ciclo se repetindo sucessivamente. O ciclo de trabalho ainda seria de 50%, mas a lâmpada pareceria brilhantemente iluminada durante os primeiros cinco segundos e desligada para os próximas.
Para que a lâmpada tenha uma tensão média de 4,5 volts, o período do ciclo deve ser curto em relação ao tempo de resposta do LED com a mudança no estado de comutação. Para conseguir o efeito desejado de uma lâmpada dimmer (sempre acesa variando somente sua intensidade), é necessário aumentar a frequência de modulação. O mesmo é verdade em outras aplicações de PWM sendo que frequências de modulação comuns variam de 1kHz a 200kHz. Na Figura 4, você pode ver uma animação do brilho do LED variando a largura do pulso.
Figura 4 – PWM variando a intensidade de um LED

Figura 5 – PWM e termos
Em termos de definição, temos:
Ciclo ou Período – o intervalo de tempo entre a subida de um pulso (dado em segundos);
Frequência – a taxa de bordas de subida de um pulso (dado em Hz ou ciclos por segundo). É simplesmente o inverso do período;
Taxa de Ciclo – tempo no período em que o pulso está ativo ou alto, dividido pelo tempo de ciclo (é dado em porcentagem do período completo)
3 – O PWM Gerando Sinais Analógicos
Como dito anteriormente, a técnica de modulação é utilizada em dispositivos como o inversor de frequência no controle de motores elétricos sendo que neste caso, ele opera com eficiência em frequências acima de 20-30 kHz. Esta eficiência é conseguida porque a corrente (indução) nos enrolamentos do motor não colapsa completamente durante o curto período de desativação do PWM e este colapso leva uma certa quantidade de tempo que depende das especificações do motor. Seguindo este conceito, controlar motores elétricos em altas frequências de PWM mantém a corrente de indução em todo o processo de operação do motor, resultando em eficiências elevadas.
Os sinais PWM também podem ser usados para gerar sinais analógicos que variam no tempo e em conjunto a filtros passa-baixa podemos obter sinais analógicos fieis a um sinal que seja de fato analógico. O tipo de filtro mais básico é simplesmente um capacitor conectado entre o sinal e o terra. Um exemplo de tal alisamento é mostrado no gráfico da Figura 6, onde com a variação PWM de um ciclo de aproximadamente 25% a 75%, temos uma onda próxima de uma onda senoidal. Veja que saída real, em azul, não imita perfeitamente uma onda senoidal mas forma um conjunto de médias locais que atuam como uma onda senoidal.

Figura 6 – PWM na geração de sinal analógico.
Um método simples para obter as características do sinal PWM é dividir o sinal analógico em um número de segmentos discretos iguais ao comprimento do período PWM. Então, o ciclo para este período pode ser ajustado igual à média do sinal analógico durante este mesmo intervalo.
4 – Vantagens e Considerações do PWM
Uma das vantagens de aplicar o PWM é que o sinal permanece digital em todo o percurso desde o processador até o sistema controlado e nenhuma conversão de digital para analógico é necessária. Ao manter o sinal digital, os efeitos de ruído são minimizados pois um ruído só pode afetar um sinal digital se ele for forte o suficiente para alterar uma lógica 1 para uma lógica 0 ou vice-versa.
Maior imunidade ao ruído é mais um benefício desta técnica se comparada ao controle analógico. Esta é a principal razão pela qual o PWM é utilizado para a comunicação pois mudar um sistema de sinal analógico para PWM pode aumentar drasticamente o comprimento de um canal de comunicação. Assim, quando o sinal chega na extremidade receptora, uma rede RC (resistor-capacitor) ou LC (indutor-capacitor) adequada pode remover a onda quadrada modulada de alta freqüência e retornar o sinal para a forma analógica.
Encontramos aplicações PWM em uma grande variedade de sistemas. Como um exemplo concreto, considere um freio controlado por modulação. Em termos simples, um freio é um dispositivo que age duramente sobre algo de forma a parar seu movimento. Em muitos freios, a quantidade de pressão (ou potência de parada) é controlada com um sinal de entrada analógico sendo que quanto mais tensão ou corrente for aplicada ao freio, maior será a pressão exercida pelo freio.
A saída de um controlador PWM pode ser conectada a um interruptor entre a alimentação e o freio. Para produzir mais pressão de parada, é utilizado um software de controle que aumenta o ciclo de trabalho da saída PWM. Além de regular o freio para uma quantidade específica de pressão de frenagem, é possivel considerar medições para determinar a relação matemática entre o ciclo de trabalho e a pressão. (Estas medições podem ser a temperatura de funcionamento, desgaste de superfície, e assim por diante).
Para ajustar a pressão sobre o freio para digamos, 100 psi, o software de controle faria uma consulta inversa para determinar o ciclo de trabalho que deve produzir essa quantidade de força. Ele então ajustaria o ciclo de trabalho de PWM para o novo valor e o freio responderia adequadamente. Se um sensor estiver disponível no sistema, o ciclo de trabalho pode ser ajustado, sob controle de malha fechada, até que a pressão desejada seja alcançada com precisão.
Referências:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}